 README
¶
README
¶
GoCV
go-ayame と Pion、libvpx、Ayame Labo を使って、WebRTC P2P 経由で受け取った Video データを使ってモーション検知をし、検知した場合に DataChannel を利用して送信側にデータを送信するサンプルコードです。
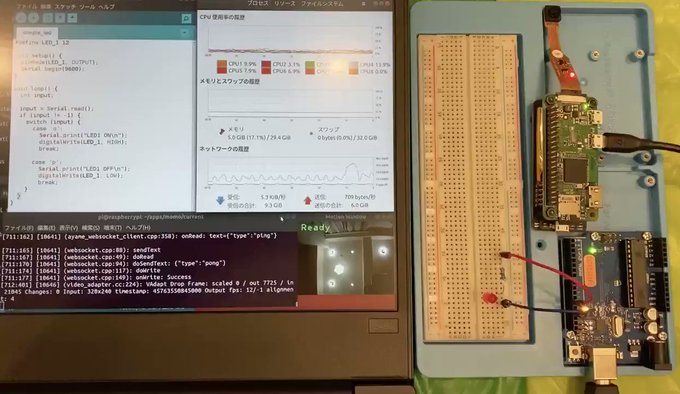
実際に動いている様子は以下のリンク先の Tweet の動画で確認できます。
Raspberry Pi Zero W + WebRTC Native Client momo で配信した動画を、go-ayame を使って受信して、GoCV (OpenCV) でモーション検知して、検知結果を DataChannel で戻して serial 経由で Arduino に指令を出して LED を点灯、消灯している図
https://twitter.com/hakobera/status/1244279413329416192
依存ライブラリのインストール
macOS + libvpx 1.8 と Ubuntu 18.04.4 LTS + libvpx 1.7 の組み合わせでのみ動作確認しています。
それぞれの環境で以下のコマンドを実行して、依存ライブラリをインストールしてください。
macOS
$ brew install libvpx
Homebrew がセットアップされていない場合は、先にセットアップを済ませておいてください。
GoCV のインストール方法は公式ドキュメントを参照してください。
Ubuntu 18.04
$ sudo apt install libvpx-dev libcanberra-gtk-module
GoCV のインストール方法は公式ドキュメントを参照してください。
使い方
WebRTC Native Client Momo と組み合わせて使うことを想定しています。
Arduino
Arduino IDE などを使って、以下のスケッチを Arduino に書き込んでおきます。
ここでは 12 番のピンに LED をつなげている前提なので、必要に応じて #define LED_1 12 の部分は書き換えてください。配線図については省力します。
#define LED_1 12
void setup() {
pinMode(LED_1, OUTPUT);
Serial.begin(9600);
}
void loop() {
int input;
input = Serial.read();
if (input != -1) {
switch (input) {
case 'o':
Serial.print("LED1 ON\n");
digitalWrite(LED_1, HIGH);
break;
case 'p':
Serial.print("LED1 OFF\n");
digitalWrite(LED_1, LOW);
break;
}
}
}
momo
momo を以下のオプション付きで起動します。
$ momo --no-audio ayame wss://ayame-labo.shiguredo.jp/signaling <room-id> --serial /dev/<your-arduino-serial-device-name>,9600
gocv
momo の起動オプションでしていした RoomID をコマンドラインパラメータとして指定します。
go run . -url wss://ayame-labo.shiguredo.jp/signaling -room-id <room-id>
 Documentation
¶
Documentation
¶

There is no documentation for this package.